Bilinqvizm
Bilinqvizm (ikidillik) — əhalinin müəyyən qruplarının iki və ya daha çox dildə danışa bilməsi.
İki dil bilən insanlar bilinqvlər, iki dildən çox bilənləri polilinqvnlər, altı dildən çox bilənlərə isə poliqlotlar adlanırlar. Dil müəyyən sosial qruplaşma rolu oynadığına görə, bilinqvlər eyni zamanda iki sosial qrupa məxsus olurlar..
Р)
== Ədəbiyyat ==
Ахунзянов Э.М. Двуязычие и лексико-семантическая интерференция. – Казань, 1978.
Аюпова Л.Л. Вопросы социолингвистики: типы двуязычия в Башкирии. – Свердловск, 1988.
Бертагаев Т.А. Билингвизм и его разновидности в системе употребления // Проблемы двуязы-чия и многоязычия. – М.: Наука, 1872. – С. 82–88.

Antikitera mexanizmi
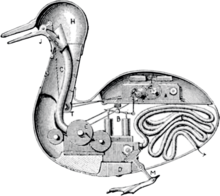
Antikitera mexanizmi (yun. Μηχανισμός των Αντικυθήρων) — təqvim və astroloji məqsədlərə görə tutulmaları, həmçinin Olimpiyadaları, Qədim Olimpiya oyunlarının mərhələlərini, astronomik vəziyyətləri proqnozlaşdırmaq üçün nəzərdə tutulmuş qədim analoq kompüter.
Tapıntı 340 mm × 180 mm × 90 mm taxta qutuda yerləşirdi. Bu qurğu bir-birinin üstünə geydirilmiş ən azı 30-a yaxın tunc dişli çarxdan yaradılmış mürəkkəb saat mexanizmidir. Onun qalıqları 82 ayrı-ayrı fraqmentlər şəklində tapılıb, onlardan yalnız yeddi hər hansının dişli çarxları və əhəmiyyətli yazıları olduğu müəyyən edilib. Ən böyük dişli çarxın diametri təxminən 140 mm-dir və ilkin olaraq 223 dişi var idi.
Artefakt Andikitira adasının kənarında eramızdan əvvəl birinci əsrin 2-ci yarısında baş vermiş gəmi qəzasının 1900–1901-ci illərdə kəşf olunması ilə bərpa edilib. Cihazın Yunan alimləri tərəfindən işlənib hazırlanması və qurulması və tarixinin eramızdan əvvəl 100–150-ci illərə və ya son araşdırmalara görə eramızdan əvvəl 205-ci ilə aid olması güman edilir.
Bu texnologiyaya aid biliklər çox qədim zamanlarda müəyyən hadisələr zamanı məhv olub. On dördüncü əsrdə Avropada mexaniki astronomik saatların inkşafına qədər, onun mürəkkəbliyinə və ustalığına yaxınlaşan texnoloji artefaktlar mövcud olmayıb.
Dövlət mexanizmi
Dövlət mexanizmi — praktik olaraq dövlət gücünü, dövlətin vəzifələrini və funksiyalarını həyata keçirən dövlət orqanlarının və qurumlarının ayrılmaz bir iyerarxik sistemi. Dövlətin mexanizmi dövlətin mahiyyətinin ayrılmaz hissəsidir: dövlət mexanizmi xaricində və olmadan dövlət mövcuddur və ola da bilməz.
== Xüsusiyyətləri ==
Dürüstlük — dövlətin mexanizmi ayrılmaz bir quruluşdur; bir dövlətin ərazisində və bir dövlət daxilində bir neçə dövlət aparatı mövcud ola bilməz ;
Hiyerarşiya — dövlətin mexanizmi koordinasiya və tabelik prinsiplərinə əsaslanır, mürəkkəb bir güc piramidal quruluşunu təmsil edir ;
Xüsusi bir tərkib — dövlət mexanizminin strukturuna daxil olan dövlət orqanları və qurumları xüsusi təlim keçmiş insanlardan ibarətdir ;
Fəaliyyətin xüsusi məqsədləri — dövlət hakimiyyətinin, dövlətin tapşırıq və funksiyalarının həqiqi icrası ;
Maddi və texniki təhlükəsizlik.
== "Dövlət mexanizmi" və "dövlət aparatı" anlayışı ==
"Dövlət mexanizmi" və "dövlət aparatı" anlayışları arasındakı əlaqəyə dair bir neçə fikir vardır:
Bu anlayışlar əhatə dairəsi ilə tamamilə üst-üstə düşür, sinonim kimi istifadə olunur. "Mexanizm" termini yalnız aparatın bütövlüyünü, effektiv fəaliyyətə yönəlməsini vurğulayır.
Dövlət aparatı birbaşa idarəetmə fəaliyyətini həyata keçirən və bunun üçün səlahiyyət səlahiyyətləri verilən orqanlar sistemi kimi başa düşülür və "dövlət maşını" anlayışına dövlət aparatı, dövlət qurumları və təşkilatları ilə yanaşı dövlət aparatının fəaliyyət göstərdiyi dövlət aparatının (silahlı qüvvələr, polis, cəza müəssisələri və s.) "maddi əlavələri".
Dövlətin aparatı statikada dövlətin bütün orqanları və dövlət mexanizmi altında eyni orqanlar olaraq, ancaq dinamik olaraq başa düşülür. Dövlətin aparatını öyrənərkən ilk növbədə bu və ya digər dövlət orqanının məqsədi, formalaşma qaydası, səriştəsi və dövlətin mexanizmi öyrənilərkən birbaşa dövlət orqanlarının fəaliyyəti, əlaqələri haqqında danışılır. dövlətin müəyyən funksiyalarını həyata keçirmə prosesində bir-biri ilə.
Dövlətin mexanizmi yalnız işçilərin deyil, həm də dövlət funksiyalarının və vəzifələrinin həyata keçirilməsinə xidmət edən maddi-texniki obyektlərin hamısını özündə birləşdirən daha geniş bir kateqoriyadır.
Zəlzələnin yaranma mexanizmi
Zəlzələnin yaranma mexanizmi — Zəlzələqabağı hansı əlamətlərin yaranacağını qabaqcadan müəyyənləşdirə bilən nəzəriyyədir ki, bu da zəlzələlərin proqnozlaşdırılması üçün mühümdür. Hələ də belə bir dürüst nəzəriyyə olmadığindan, zəlzələnin proqnozlaşdırılması məsələsi həll edilməmişdir.
Zəlzələ — Yer qabığında və yuxarı mantiya qatında deformasiyanın möhkəmlik həddinə çatması nəticəsində müəyyən hissələrdə baş verən qirilmanı müşayiət edən titrəyişdir. Qırılma, sınma təsadüfı hadisə olduğundan bu modelə görə zəlzələnin proqnozu mümkün deyil nəticəsi çıxır.
Zəlzələnin proqnazlaşdırılması — zəlzələnin nə vaxt, harada hansı güclə olacağını qabaqcadan bildirməkdir. Bu problemi həll etmək üçün zəlzələnin bir qırılma hadisəsi olması ideyasından əl çəkilməlidir. Zəlzələnin hansı əlamətlərinin olacağını qabaqcadan söyləyə bilən qravitasiya qüvvələrinə xəssas geoblokların rəqsi modelini yaratmaq lazım olduğu söylənilir.
Ramiz Hüseynov. Bir daha zəlzələnin proqnozlaşdırılması haqqında. Elm və həyat jurnalı.

Girişin idarə edilməsi mexanizmi
Girişin idarə edilməsi mexanizmi− avtomatlaşdırılmış sistemlərdə icazəsiz girişi aşkarlayan, onun qarşısını alan və qanuni girişə icazə verən avadanlıq və ya proqram təminatı, sistem proseduru, administrator proseduru və onların müxtəlif kombinasiyalarıdır.
== Ədəbiyyat ==
İmamverdiyev Y.N, "İnformasiya təhlükəsizliyi terminlərinin izahlı lüğəti", 2015,“İnformasiya Texnologiyaları” nəşriyyatı,160 səh.

Qlobal Biomüxtəliflik Məlumat Mexanizmi
Qlobal Biyo Müxtəliflik Məlumat Mexanizmi (GBIF) — biomüxtəliflik haqqında elmi məlumatların veb xidmətlərindən istifadə edərək İnternet vasitəsilə İnternetə çıxarılmasına yönəlmiş beynəlxalq bir təşkilatdır. Məlumatlar dünyanın bir çox qurumu tərəfindən verilir; GBIF-in informasiya arxitekturası bu məlumatları tək bir portal vasitəsilə əlçatan və axtarışa imkan yaradır. GBIF portalı vasitəsilə əldə edilən məlumatlar, ilk növbədə dünya üçün bitki, heyvan, göbələk və mikroblara dair yayım məlumatları və elmi adlardır.
GBIF-in vəzifəsi davamlı inkişafa dəstək olmaq üçün dünya miqyasında bioloji müxtəliflik məlumatlarına pulsuz və açıq girişi təmin etməkdir. İştirakçılığın təşviqi və tərəfdaşlar arasında işləməyə vurğu edilən prioritetlər arasında biomüxtəliflik məlumatlarının səfərbər edilməsi, elmi bütövlüyü və qarşılıqlı fəaliyyətin təmin edilməsi üçün protokol və standartların hazırlanması, müxtəlif məlumatlar növlərinin ayrı mənbələrdən bir-birinə bağlanmasına imkan yaratmaq üçün bir informatika arxitekturasının qurulması, potensialın artırılması və katalizləşdirilməsidir. təkmilləşdirilmiş qərar qəbuletmə üçün analitik vasitələrin inkişafı.
GBIF, genlərdən ekosistemlərə qədər bioloji təşkilatın spektrindən rəqəmsal məlumat mənbələri arasında məlumat əlaqələri yaratmağa və georeferans və CİS vasitələrindən istifadə edərək bunları elm, cəmiyyət və davamlılıq üçün vacib olan məsələlərlə əlaqələndirməyə çalışır. Həyat Kataloqu, Biomüxtəliflik Məlumat Standartları, Həyat Barkodu Konsorsiumu (CBOL), Həyat Ensiklopediyası (EOL) və GEOSS kimi digər beynəlxalq təşkilatlarla ortaq şəkildə işləyir.
2002-2014-cü illərdə GBIF, biomüxtəliflik informatikası sahəsində illik 30.000 Avro dəyərində olan Ebbe Nielsen Mükafatına layiq görülən qlobal bir mükafat verdi. 2018-ci ildən etibarən GBIF Katibliyi iki illik mükafat təqdim edir: GBIF Ebbe Nielsen Challenge və Gənc Tədqiqatçılar Mükafatı.
Mexanizm
Mexanizm — bir elementin hərəkəti başqalarının məcburi hərəkətini yaradan, hissələrdən ibarət kompleksdır. Bu halda sistemin bütün nöqtələrinin sürətləri və təcilləri təyin oluna bilir. Mexanizmlər hərəkəti ötürmək üçün tətbiq olunurlar.
Mexanizmlərin hərəkəti cütlərlə təyin olunur. Menanizmdə bir-biri ilə əlaqədə olan elementlərə kinematk cütlər deyilir. Cütlər isə öz növbəsində bəndlərdən təşkil olunur. Məsələn, prizmatik kanalda oturdulmuş bənd irəli geri hərəkət edə bilir, ona görə də onlar birlikdə cüt təşkil edirlər. Silindrik oymaqda oturdulmuş içlik kinematik cütdürlər. Vint və qayka da kinematik cüt kimi baxıla bilər.
Mexanizmlər ötürmələrin bir növüdür.

Qazpaylayıcı mexanizm
Qazpaylayıcı mexanizm- daxili yanma mühərriklərinin silindrlərinə karbüratordan gələn qaz qarışığının vaxtında paylanması və iş prosesində yaranan qazların xaric edilməsinə xidmət edir. Bu, silindrlərin sorma və xaricetmə klapanalarının paylayıcı valın dirsəkləri ilə idarəsi sayəsində yerinə yetirilir. Paylayıcı val, dirsəkli valla dişli qayış və ya zəncir ötürməsinin köməyi ilə əlaqələndirilərək onunla sinxronlaşdırlmış hərəkət icra edir.
Qazpaylayıcı mexanizm paylayıcı valın vəziyyətindən asılı olaraq iki növə bölünürlər:
Yuxarıda (silindr başlığında) yerləşmiş vallı,
Aşağıda (mühərrik blokunda) yerləşmiş vallı.
Şəkildə üst hissədə yerləşmiş qazpaylayıcı mexanizm təsvir edilmişdir. Paylayıcı val iş tsiklinə uyğun dirsəkli valdan aldığı fırlanma hərəkəti zamanı dönərək dirsəkləri ilə klapanları ardıcıl olaraq itələyir. Klapanın geriyə qayıtması mexanizmdə quraşdırılmış güclü yayların hesabına baş verir. Paylayıcı val ya bir başa klapanın başında yerləşmiş itələyiciyə, ya da ox ətrafında dönən lingdən istifadə edilir. İkinci quruluş daha çox altda yerləşmiş paylayıcı valldan istifadə zamanı tətbiq olunur.
Dördtaktlı mühərriklərdə klapanlar yüksək temperaturda işləyir.
Avtomat (mexanizm)
Avtomat — nisbətən öz-özünə işləyən maşın və ya əməliyyatlar ardıcıllığını avtomatik izləmək və ya əvvəlcədən müəyyən edilmiş təlimatlara cavab vermək üçün nəzərdə tutulmuş idarəetmə mexanizmi. Bəzi avtomatlar, məsələn, mexaniki saatlarda zəng vuranlar, təsadüfən baxan şəxsə mexaniki robot kimi öz gücü və ya iradəsi ilə işlədikləri illüziyasını vermək üçün nəzərdə tutulub. Termin uzun müddətdir hərəkət edən insanlara və ya heyvanlara bənzəyən, insanları heyran etmək və/və ya əyləndirmək üçün hazırlanmış avtomatlaşdırılmış kuklalarla əlaqələndirilir.
Animatronik, tez-tez filmlərdə və əyləncə parklarında personajların və ya canlıların təsviri üçün istifadə olunan elektronika ilə müasir avtomat növüdür.
== Etimologiya ==
"Avtomat" sözü qədim yunanca "öz iradəsi ilə hərəkət edən" (q.yun. αὐτόματον) sözünün latın dilinə tərcüməsidir. Bu söz ilk dəfə Homer tərəfindən qapının avtomatik açılmasını və ya təkərli ştativlərin avtomatik hərəkətini təsvir etmək üçün istifadə edilmişdir. Əsasən qeyri-elektron hərəkət edən maşınları, xüsusən də insan və ya heyvan hərəkətlərinə bənzəmək üçün hazırlanmış maşınları, məsələn, köhnə açıq saatlardakı jakları və ya ququ quşlu saatdakı quşu və hər hansı digər cizgi fiqurlarını təsvir etmək üçün istifadə olunur.
== İstinadlar ==
== Xarici keçidlər ==
The Automata and Art Bots mailing list home page
Modern Automata Museum
The House of Automata – The largest online gallery of automata
J. Douglas Bruce, 'Human Automata in Classical Tradition and Mediaeval Romance', Modern Philology, Vol. 10, No.

Mexanizm dizayn nəzəriyyəsi
Mexanizm dizayn nəzəriyyəsi (ing. mechanism design) — oyunçuların rasional hərəkət etdikləri və iqtisadi aktyorların hərəkətlərinin sosial seçim funksiyası üçün optimal bir həllə səbəb olduğu istədikləri hədəflərə çatmaq üçün mexanizmlər və təşviqlərin yaradılmasına yanaşma olan iqtisadiyyat və oyun nəzəriyyəsi sahəsində bir iş. Bu yanaşma ilk dəfə 1960-cı ildə Leonid Qurviç tərəfindən təklif edilmişdir.
Leonid Qurviç 1959-1960-cı illərdə iqtisadi resursların əsas müddəalarını ilk dəfə "Resursların bölüşdürülməsi proseslərindəki optimallıq və informasiya səmərəliliyi" məqaləsində formalaşdırmış, 1973-cü ildə həqiqət xüsusiyyətini, daha sonra identifikasiya prinsipini formalaşdırmış və 2006-cı ildə birlikdə Stanley Reiter [ru] ilə "İqtisadi Mexanizmlərin Dizaynı [en]" mexanizmlərinin dizaynı haqqında bir kitab nəşr olundu. Erik Maskin 1980-1984-cü illər üçün məqalələrində "tətbiqetmə nəzəriyyəsi" deyilən bir sənəd hazırladı: lazımi xüsusiyyətlərə sahib olması üçün belə bir protokolun tərtib edilməsi. Və Roger Myerson 1979-1985-ci illər üçün sənədlərində bu yanaşmanı auksionlara tətbiq etmişdir . İsveç Kral Elmlər Akademiyası, 2007-ci ildə Alfred Nobel İqtisadiyyat Memorial Mükafatını Leonid Gurviç, Eric Maskin və Roger Myerson'a "optimal qaynaq bölgüsü mexanizmləri nəzəriyyəsinin təməlini qoyduğuna görə" verdi.
İqtisadi mexanizmlərin dizaynı - ayrı-ayrı iqtisadi agentlərin hərəkətlərinin sosial seçim funksiyası üçün optimal bir həllə gətirib çıxardığı qarşılıqlı əlaqə mexanizmi yaradan yanaşmadır.
Mexanizm - iqtisadi agentlərin qarşılıqlı əlaqəsidir, strateji oyun formasıdır. Oyun oyunçuların (iqtisadi agentlərin) hərəkətlərinin təsviri və bir sıra hərəkətlərin nəticəsidir.
Yeni İqtisadi Mexanizm
Yeni İqtisadi Mexanizm — 1968-ci ildə Macarıstanda başlayan geniş ölçülü iqtisadi islahatdır. İslahatın təsiri 1972–1978-ci illər arasında Şərq blokunun ortaq siyasəti nəticəsində azaldı, amma 1989-cu il inqilabları sona çatana qədər islahat şərtləri vurğulanmasa da, Macarıstan iqtisadiyyatına təsir etməyə davam etdi. İslahat səbəbiylə 1980-ci illərdə Macarıstan bazar mexanizmlərini mərkəzi planlamaya nisbətən yüksək tutdu. Bu, sovet iqtisadiyyatından olduqca fərqli bir yol izləməsinə və eyni zamanda siyasi çətinliklərə səbəb oldu. Qərb qaynaqları islahatların təsiri altındakı macar iqtisadiyyatının Şərq bloku ölkələrindən daha yaxşı performans göstərdiyini bildirdilər.
1956–1968-ci illər arasında Mərkəzi Avropada islahatlar başladı. Bu islahatların başlanğıcı 1956-c il Macarıstan inqilabından başladı. İnkişafı Yanoş Kadarın Macarıstan liderliyinə gəlməsi və Macarıstan Sosialist Fəhlə Partiyasının yaranması ilə nəticələndi. Kadarın 1961-ci ildə "Bizə qarşı olmayanların bizimlə olduğunu" söyləyərək birləşmiş Macarıstan yaratmaq hədəfini yaratdı. Sosial barışa çatan Kadar əsas diqqətini iqtisadi inkişafa yönəltdi.
Çarxqollu-sürgüqollu mexanizm
Çarxqollu-sürgüqollu mexanizmi porşenin irəli-geri hərəkətini fırlanma hərəkətinə (məsələn: daxili yanma mühərriklərində) və əksinə çevirməyə xidmət edir. Çarxqollu-sürüngəc mexanizmini hissələri iki qrupa bölünür, bunlar hərkətli və hərkətsizdirlər:
hərəkətli olanlar: porşen, sırğalarla birlikdə, porşen barmağı, sürgü qolu, dirsəkli val yastıqlarla birlikdə və çarx qolu, nazimçarx.
hərəkətsiz olanlar:silindrlər bloku (daxili yanma mühərriklərində baza hissə sayılır), silindrlər başlığı, nazimçarx, mufta, silindrlər blokunun başlığı, bərkidici hissələr, kipləşdiricilər, tutqaclar
Daxili-yanma mühərriklərində
Qazın təsiri altında porşen aşağıya, dirsəkli vala tərəf hərəkət edir. "Porşen-sürgü qolu" və "sürgü qolu-val" cütlüyünü köməyi ilə porşenin xətti hərkəti dirsəkli valın fırlanma hərkətinə çevrilir.
Hidravlik dönmə mexanizmində (əks sxem)
Dirskli val xaric momentin təsirindən fırlanma hərkəti icra edir. Onun bu hərkəti "val-sürgü qolu-porşen" zənciri vasitəsilə porşenin xətti hərkətinə çevrilir.
Kəngərli, Ayaz Mahmud oğlu. Maşın və mexanizmlər nəzəriyyəsi : dərslik / A. M. Kəngərli ; elmi red. S. X. Kərimov. - Bakı : Müəllim, 2004.

Mexaniki dalğalar
Dalğa — rəqslərin mühitdə yayılması prosesidir. Mexaniki dalğa mexaniki rəqslərin elastik mühitdə yayılmasıdır. Mexaniki dalğaların yaranması və yayılması üçün ən vacib şərt elastik mühitin olmasıdır.
Ümumi dalğa tənliyi budur:
x
=
a
cos
ω
(
t
−
r
v
)
{\displaystyle x=a\cos \omega (t-{\frac {r}{v}})}
Burada x-nöqtənin tarazlıq vəziyyətindən olan yerdəyişməsi, A-rəqsin amplitududur, t-rəqsin başlanması anından hesablanan zaman, v-dalğanın yayılma sürəti, r-rəqsin koordinat başlanğıcından t müddətinə yayıldığı məsafədir.
Dalğanın 2 növü vardır:
Uzununa dalğa – rəqs istiqamətində yayılan dalğaya deylir.
Eninə dalğa – rəqslərə perpendikulyar istiqamətində yayılan dalğaya deyilir.
Eninə dalğa zərrəciklərin rəqs istiqamətinə perpendikulyar istiqamətdə yayılan dalğaya deyilir. Eninə dalğa dalğa qabarıqlarının və çökəkliklərinin növbə ilə təkrarlanmasıdır. Eninə dalğalar elə mühitdə yayıla bilər ki, orada mühitün formasının dəyişməsi nəticəsində elastiklik qüvvələri yaransın. Ona görə də eninə elastik dalğalar ancaq bərk cisimlərdə yayılır.
Mexaniki deformasiya
Deformasiya — xarici qüvvənin təsiri ilə cismin forma və ölçülərinin dəyişməsidir. Onun aşağıdakı halları vardır:
Elastik deformasiya – xarici qüvvenin təsiri kəsildikdən sonra cismin öz əvvəlki forma və ölçülərini almasına deyilir.
Plastik deformasiya – xarici qüvvənin təsiri kəsildikdən sonra cismin öz əvvəlki forma və olçülərini almamasına(qalıq qalmasına)deyilir.
Bərk cisimlərdə deformasiyanın növləri – dartılma,sıxılma,sürüşmə,burulma,əyilmədir.
Dartılma deformasiyası – cismin uzunluğunu artmasına səbəb olan deformasyadır. Məsəlsən məftillərin, rezinin uzanması və s.
Sıxılma deformasiyası – uzunluğun azalmasına səbəb olan deformasyadır.
Sürüşmə deformasiyası – cismin paralel təbəqələrinin bu təbəqələrə paralel qüvvələrin təsiri ilə sürüşməsinə deyilir. Ayrı-ayrı metal hissələrini bağlayan bolt və pərçimlər sürüşmə deformasyasına məruz qalır.
Burulma deformasiyası – bərk cisimlərin uclarına əks istiqamətdə yönəlmiş qüvvə momentləri tətbiq olunanda yaranan deformasyadır.
Mexaniki emal
Mexaniki emal – müxtəlif materiallardan hazırlanmış pəstaha son və ya sonrakı emal mərhələləri üçün lazımi dəqiqliyi və formanı vermək üçün tətbiq olunan emal növüdür.
Maşınqayırmada əsasən üç mexaniki emal üsulu tətbiq olunur:
1. Kəsmə ilə emal, burada pəstah metalkəsən dəzgahda kəsici alətin köməy ilə addım-addım yonularaq lazımi formaya salınır. Tətbiq olunan kəsmə üsulları:
xarici səthlər üçün torna, pardaqlama,hamarlama, cilalama, superfiniş,
daxili səthlər üçün – içyonma, burğulama, zenkerləmə, rayberləmə, dartma, pardaqlama, cilalama, honalama.
müstəvi səthlər üçün yonma, frezləmə və pardaqlama.
2. Plastiki deformasiya üsulu ilə xarici qüvvənin təsiri altında pəstah sıxılır, bu zaman o formasını, ölçüsünü, fiziki-mexaniki xassələrini dəyişir. Buraya döymə, ştamplama, pressləmə və yayma daxildir.
3. Elektrofiziki emal elektrik cərəyanının xassələrinə əsaslanır: elektro qığılcımla emal, elektro impulsla emal, elektro qövslə emal.
Mexaniki hərəkət
Mexaniki hərəkət — zaman keçdikcə bir cismin (yaxud maddi nöqtənin) digər cismə nəzərən, həmçinin eyni bir cismin ayrı-ayrı hissələrinin bir-birinə nəzərən məkanda yerdəyişməsi. Mexaniki hərəkəti riyazi baxımdan təsvir etmək üçün yerdəyişmə, gedilən yol, sürət, təcil və zaman kimi anlayışlardan istifadə olunur.
Hərəkəti öyrənmək, yəni zaman keçdikcə cismin mexaniki yerdəyişməsini müəyyən etmək üçün müvafiq koordinat sistemi seçmək və onu hesablama cisminə bağlamaq lazımdır. Bundan əlavə gedilən yolun uzunluğunu təyin etmək üçün uzunluq etalonuna və zamanı ölçmək üçün ölçü cihazı rolu oynayan saata da ehtiyac vardır. Adətən sadaladığımız bu dörd ünsür — hərəkəti öyrənmək üçün seçdiyimiz cisim ona bağlı koordinat sistemi, uzunluq etalonu və saat birlikdə hesablama sistemi adlandırılır. Hər konkret mexaniki hərəkəti öyrənmək üçün müvafiq hesablama sistemi seçilir. Hərəkətin öyrənilməsi üçün vasitə rolunu oynayan koordinat sisteminin (məsələn, düzbucaqlı dekart koordinat sisteminin) başlanğıcı hesablama cismində yerləşdirilir və hərəkət məhz bu koordinat sisteminə nəzərən öyrənilir.
Mexaniki hərəkət zaman keçdikcə cismin fəzada yerdəyişməsi olduğundan zaman və məkan anlayışları ilə yaxından tanış olmaq lazımdır.
Klassik mexanikanın banisi Nyuton zaman və məkanı mütləq qəbul etmişdir. Nyutona görə zaman hesabat sistemindən asılı olmayaraq müntəzəm davam edir və bütün hesabat sistemləri üçün eynidir.

Mexaniki iş
Mexaniki iş — cismə təsir edən qüvvənin modulu, yol və qüvvə ilə yol arasındakı bucağın kosinusu hasilinə bərabər olan skalyar fiziki kəmiyyətdir.
1) Qüvvə ilə hərəkət istiqaməti arasındakı bucaq α olarsa,
A
=
F
×
S
×
c
o
s
α
{\displaystyle A=F\times S\times cos\alpha }
F
{\displaystyle F}
— qüvvə,
S
{\displaystyle S}
isə yoldur.
2) Mexaniki iş güclə zamanın hasilinə bərabərdir:
A
=
N
×
t
{\displaystyle A=N\times t}
.
N
{\displaystyle N}
— güc
t
{\displaystyle t}
isə zamandır.
3) Elektrik cərəyanının işi - verilmiş hissədəki gərginliklə cərəyan şiddəti və cərəyanın keçmə müddətinin hasilinə bərabərdir:
A
=
U
×
J
×
T
{\displaystyle A=U\times J\times T}
düsturu ilə hesablanır.
U
{\displaystyle U}
— gərginlik
J
{\displaystyle J}
— cərəyan şiddəti
T
{\displaystyle T}
isə zamandır.
1 Coul-1 Nyuton qüvvənin qüvvə istiqamətində gedilən 1m yolda gördüyü işə deyilir və BS-də iş vahidi olaraq götürülür.
1
C
=
1
N
×
m
{\displaystyle 1C=1N\times m}
A
=
F
×
S
×
c
o
s
α
{\displaystyle A=F\times S\times cos\alpha }
ifadəsindən göründüyü kimi əgər qüvvə hərəkət istiqamətindədirsə, iş ən böyük yəni A=FS, iti bucaq əmələ gətirirsə iş müsbət, düz bucaq əmələ gətirirsə A=0, kor bucaq əmələ gətirirsə mənfi olur.
Potensiallı sahədə qapalı trayektoriya üzrə görülən iş sıfır olur. Həm də potensiallı sahədə görülən iş trayektoriyanın formasından asılı olmayıb başlanğıc və son nöqtələrin vəziyyəti ilə təyin olunur.

Mexaniki qüvvələr
Mexaniki qüvvələr — Təbiətdə müxtəlif növ qüvvələrə rast gəlinir: cazibə qüvvəsi, elektrik və maqnit qüvvələri, elastik qüvvə, səthi gərilmə qüvvəsi, sürtünmə qüvvəsi və s. Sadaladığımız bu qüvvələrin adları onların təzahür formaları ilə əlaqədardır. Məsələn, səthləri bir-birinə toxunan iki cisimdən biri digərinə nəzərən nisbi hərəkət edərsə onlar arasında yaranan təsir qüvvəsi sürtünmə qüvvəsi, uzanmış elastiki cismi ilk vəziyyətə qaytarmağa çalışan qüvvə elastiki qüvvə, sükunətdə olan iki yüklü hissəcik arasında yaranan təsir qüvvəsi elektrik qüvvəsi adlanır. Lakin hadisələrin mahiyyəti ilə dərindən tanış olduqda adını çəkdiyimiz bu üç qüvvənin eyni bir təbiətə — elektromaqnit təbiətinə malik olduğuna inanmaq olar. Meydanagəlmə xüsusiyyətlərinə görə qüvvələri iki qrupa bölmək olar: birbaşa təmasla meydanagələn qüvvələr və sahə qüvvələri. Deyilənləri əyani təsəvvür etmək üçün şəkil 1-ə nəzər salaq. Yayı uzatmaq və arabacığı hərəkət etdirmək üçün yayı və arabacığı dartmaq, qol vurmaq üçün isə topa birbaşa zərbə endirmək lazımdır. Göründüyü kimi, hər üç halda yalnız təsirə məruz qalan cisimlə birbaşa təmasda olmaqla onları hərəkətə gətirmək mümkündür.
Bununla bərabər birbaşa təmasda olmayan cisimlər arasında da təsir qüvvələri mövcuddur. Məsələn, bir-birindən kifayət qədər uzaqda yerləşmiş göy cisimləri arasında, müxtəlif işarəli elektrik yükləri daşıyan cisimlər arasında, dəmirlə maqnit arasında qarşılıqlı təsir qüvvələrinin mövcud olduğu hər kəsə məlumdur.

Mexaniki reduktor
Mexaniki reduktor — fırlanma momentini bir və ya bir neçə mexaniki ötürmənin köməyi ilə ötürən və çevirən mexanizmdir. Mexaniki ötümənin əsas xarakteriskaları faydalı iş əmsalı, ötürmə ədədi, ötürülən güc, valların maksimal bucaq sürəti, aparan və aparılan valların sayı, növü və ötürmə pillərinin sayıdır.
Adətən giriş valının böyük bucaq sürətini çıxış valının aşağı sürətinə çevirən və bununla fırlanma momentini artıran qurğulara reduktor deyilir. Belə reduktorlar demultiplikator adlanır. Əksinə işləyən reduktorlar isə multiplikatorlardır.
Pilləli ötürmə ədədinə malik reduktorlar sürətlər qutusu kimi tanınır. Pilləsiz ötürmələrlə işləyənlər isə variatorlardır.
Hər şeydən öncə onlar mexaniki ötürmənin növlərinə görə təsnifatlaşdırılırlar: silindirk, konik, sonsuzvint, planetar, dalğavari, spiroid və kombinəedilmiş.
Reduktorlar həmçinin gövdə, soyuma sistemi, istifadə olunan yastıqların növü, fırlanma sürəti, ötürmə ədədi, ötürülən gücə görə də fərqləndirilirlər.
Seriyalı istehsalda standartlaşdırılmış tökmə gövdələrdən istifadə edilir.

Mexaniki çəkic
Mexaniki çəkic yaxud deşər — bərk , məsələn dağ çöküntü süxurları, asfalt, beton konstruksiyaların dəlinməsi, kəsilməsi yaxud eşilməsi üçün nəzərdə tutulmuş zərbə hərəkətli əl aləti. Hər hansı təhriklə (məsələn pnevmatika ilə) hərəkətə gətirilən metal süngü və ya tir. Təhrik hissəsinin zərbə hissəsinə ötürdüyü impuls nəticəsində, dəmir süngü emal olunan metariala dəlməklə və ya kəsməklə təsir edir.

Mexaniki ötürmə
Transmissiya — fırlanma momentini mühərrikdən nəqliyyat vasitəsinin təkərlərinə, torna dəzgahının patronuna ötürən və eyni zamanda gücün, sürətin dəyişdirilməsi üçün mexanizmlər toplusu.
Transmissiyanın tərkibinə daxildirlər:
Mufta
Kardan valı
Differensial
Oynaqlı birləşmə
Чобиток В. А., Данков Е. В., Брижинев Ю. Н. и др. Конструкция и расчет танков и БМП. Учебник.

Mexaniki çökmə yataq
Mexaniki çökmə yataq — tərkibində faydalı qazıntılar olan süxurların mexaniki aşınması və hissəciklərin su axınları ilə daşınıb sonradan çökməsi nəticəsində əmələ gələn ilkin çökmə yataq. Daşınma prosesində hissəciklərin formasından, ölçüsündən, sıxlığından, davamlılığından və daşıyıcı mühitin sürətindən asılı olaraq mexaniki diferensiasiya baş verir. Mexaniki çökmə yataq tikinti materialları (çaqıl, qum, gil) yataqları, nəcib və nadir metal, almaz, qiymətli daşlar, səpinti yataqlar, habelə köklü yataqların yuyularaq yenidən çökməsi nəticəsində yaranan fosforit, kaolinit, dəmir, manqan və b. filiz yataqları aiddir.
Çökmə yataqlar
Geologiya terminlərinin izahlı lüğəti. — Bakı: Nafta-Press, 2006. — Səhifələrin sayı: 679.

Opto-mexaniki siçan
Opto-mexaniki siçan (optomechanical mouse) – optik və mexaniki qurğuların kombinasiyasının köməyilə hərəkətinin istiqamət siqnallarına çevrildiyi siçan konstruksiyası. Optik hissədə işıq-diod və verici cütlükləri olur; mexaniki hissə cərəyan kəsici dəlikləri olan fırlanan təkərciklərdən ibarət olur. Siçan hərəkət etdikdə təkərcik dönür və işıq-diodlardan gələn işıq ya dəlikdən keçərək işıq vericisinə düşür, ya da təkərciyin şəffaf olmayan hissələri tərəfindən bloklanır (qarşısı alınır). İşığın bu dəyişiklikləri verici cütlüklər tərəfindən aşkarlanır və nisbi hərəkət siqnalları kimi interpretasiya olunur. Vericilər fazaca bir-birinə nəzərən azacıq yerini dəyişdiyindən hərəkətin istiqaməti hansı vericinin ilk olaraq indikatorla kontaktı bərpa etməsinə görə müəyyənləşir. Opto-mexaniki siçanda mexaniki hissələrin əvəzinə optik qurğular istifadə edildiyindən, o, çox az-az təmir olunur, ancaq onun işləməsi üçün xüsusi səth (örtük) tələb olunur.
1964-cü ildə ixtiraçı Duqlas Engelbart (Douglas Engelbart) tərəfindən ilk siçan qurğusu (mouse) yaradılmışdır. Bu qurğunun korpusu taxtadan düzəldilmişdi, daxili hissəsi isə bir-birinə perpendikulyar yerləşən, bir ox üzərində fırlanan iki dişli çarxdan ibarət idi.
Opto-mexaniki siçanın iş mexanizmi:
Siçan hərəkət etdikdə top dönür.
Top X və Y silindirlərinə toxunaraq hərəkəti ötürür.
Mexaniki ticarət sistemi
Mexaniki ticarət sistemi (MTS) — birja və ya birjadankənar qiymətli kağızlar bazarlarında alqı-satqı zamanı əməliyyatların açılması, aparılması və bağlanması üçün tam rəsmiləşdirilmiş qaydalar toplusu. Əgər sistemin qaydalarında qeyri-səlis parametrlər varsa (məsələn: “kifayət qədər böyük şam”, “aydın ifadə olunan tendensiya” və s.), onda belə sistem mexaniki deyil. Mexanik ticarət sistemləri tez-tez avtomatik sistemlər (ATS) və ya ticarət robotları ilə eyniləşdirilir - treyderlərin fəaliyyətini tam və ya qismən avtomatlaşdırmaq üçün hazırlanmış proqramlar. Bununla belə, hər mexaniki sistem eyni zamanda avtomatik deyil: sistemdə rəsmiləşdirilməsinə baxmayaraq, proqramlaşdırıla bilməyən qaydalar ola bilər. Bundan əlavə, treyder mexaniki sistemdən istifadə edərək onun qaydalarına əl ilə riayət etməklə ticarət edə bilər
ATS şəklində mexaniki sistemin tətbiqi vəziyyətində, avtomatlaşdırma səviyyəsi fərqli ola bilər — treyderə qərar qəbul etməkdə kömək etməkdən alqoritmik ticarət metodlarından istifadə edərək birjada sifarişlərin avtonom şəkildə yerləşdirilməsi və geri götürülməsinə qədər. Proqramın əlavə funksiyaları yerinə yetirməsi də mümkündür - təqdim edilmiş sifarişlərə nəzarət, əməliyyatların monitorinqi, qrafik və hesabatların təqdim edilməsi ilə ticarətin təhlili.
Mexanik ticarət sistemini ilk təyin edənlərdən biri 1992-ci ildə N. C. Balsara, ardınca Tuşar S. Çande 1997-ci ildə “Beyond Technical Analysis” kitabında çıxış etmişdir. Mexanik ticarət sistemindən istifadə edən ən böyük fondlardan biri Ceyms Saymons tərəfindən təsis edilmiş və 100 milyard dollara yaxınlaşan aktivləri olan Renaissance Technologies-dir.
М. Матвейченков. Лишние люди // Вокруг света.

Mexaniki və üzvi həmrəylik
Sosiologiyada " mexaniki həmrəylik " və " orqanik həmrəylik " [1] Émile Durkheim tərəfindən inkişaf etdirilən həmrəylik anlayışlarıdır. Durkheim , "The Division of Labour in Society" (1893) kitabinda cəmiyyətlərin inkişaf nəzəriyyəsinin bir hissəsi kimi "mexaniki" və "üzvi həmrəylik" ifadələrini təqdim etmişdir. Durkheimin sözlərinə görə, ictimai həmrəyliyin növləri mexaniki və üzvi cəmiyyətlər olan cəmiyyət növləri ilə əlaqəlidir.
Mexaniki birliyini nümayiş etdirən bir cəmiyyətdə, onun birləşməsi və inteqrasiyası, eyni iş, təhsil və dini təlim və həyat tərzi ilə əlaqəli olan fərdlərin — homojenliyindən gəlir. Mexanika həmrəyliyi normal olaraq "ənənəvi" və kiçik miqyaslı cəmiyyətlərdə fəaliyyət göstərir. [2] Sadə cəmiyyətlərdə (məsələn, qəbilə), həmrəylik adətən ailə şəbəkələrinin qohumluq əlaqələrinə əsaslanır.
Üzvi həmrəylik, işin ixtisaslaşmasından və insanlar arasındakı tamamlayıcılıqlardan yaranan bir-birinə olan bağlılığından gəlir — müasir və sənaye cəmiyyətlərində baş verən inkişaf. [2] Bu, daha inkişaf etmiş cəmiyyətlərdə bir-birinə olan asılılıqlara əsaslanan sosial birlikdir. Fərqli vəzifələri yerinə yetirərkən və müxtəlif dəyərlər və maraqlara sahib olsa da, cəmiyyətin sırası və çox həmrəyliyi insanlarin müəyyən vəzifələrini yerinə yetirmək üçün bir-birlərinə güvənməsindən asılıdır. Beləliklə, ictimai həmrəylik daha kompleks cəmiyyətlərdə onun tərkib hissələrinin bir-birindən asılı olması yolu ilə saxlanılır (məsələn, fermerlər fermerin ərzaq istehsal etməyə imkan verən traktoru istehsal edən zavod işçilərini qidalandırmaq üçün ərzaq istehsal edir).